The L298 has two sense pins. Connect a current shunt between each sense pin and ground and you can measure the motor current. Use an op amp to amplify it and measure it with the ADC in the microcontroller. The microcontroller can stop the motor if the current gets too high.
Comment on Current limiting
litchralee@sh.itjust.works 8 months agoIn that case, I would suggest looking at a different motor driver. The driver you’ve specified doesn’t seem to have any provisions to detect a motor stall, which is something that other drivers can potentially do. Ideally, the driver would detect the back EMF from the stall and inform the microcontroller, which would then decide to stop movement.
An external current sensor might work, but that’s adding to the part count and might not be as capable as built-in functionality within the motor driver. Plus, fancier motor drivers have some neat features that you could take advantage of as well. I think it would be more prudent to consider a different driver before adding additional parts.
cmnybo@discuss.tchncs.de 8 months ago
boojumliussnark@lemmy.world 8 months ago
That sounds very cool - and way beyond my own understanding :-)
Is this something you could actually help with sketching out for me?
I found the datasheet for the L298 and I can see that for my use (I am using just out 1 and out 2) it should be pin 1 (Sense A) that should be relevant, right?
This looks like it is connected to gnd on the driver board (I can easily cut this connection).
Unfortunately I don’t understand what a current shunt is? :-)
It has me slightly worried that it says that pin 1 can go to -1v which I think would break the ADC input?
As far as I can tell the ADC input on the PICO accepts from 0 - 3.3v right?
Thanks a bunch for looking at this!
cmnybo@discuss.tchncs.de 8 months ago
A current shunt is a resistor that can handle the full current of the motor. You would probably want a 0.1Ω resistor rated for at least 1 watt.
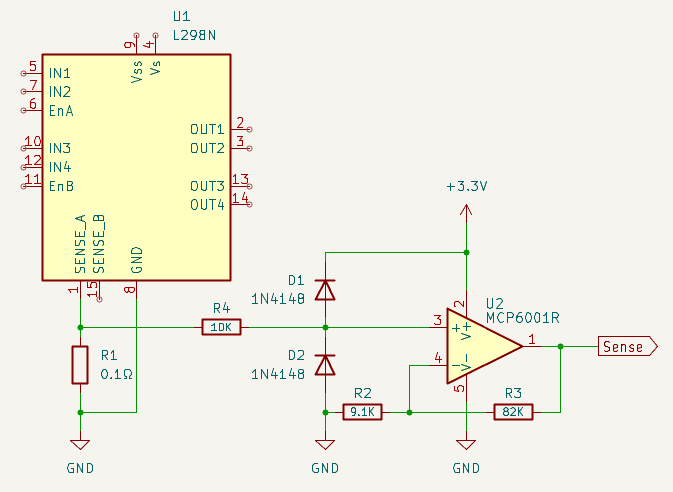
You measure the voltage drop across it to determine the current. The voltage will be quite low. With a 0.1Ω resistor and a 2A load, it will be 0.2V. You want to amplify that up closer to the full scale input of the ADC to get a decent resolution. An op amp with a gain of 10 would work well for that. Use a rail to rail op amp that can run from the 3.3V power supply.
Here is a schematic:
SchematicR4, D1 & D2 protect the op amp input from any spikes the motor produces.
boojumliussnark@lemmy.world 8 months ago
Sorry I forgot to ask: I should cut the SENSE-A connection to ground right?
boojumliussnark@lemmy.world 8 months ago
Oh, wow!
Very nice! Thank you so much for doing this!
Is it correctly understood that the “Sense” line can be hooked up directly to the ADC input on the Pico?
Now, just because I am quite ignorant when it comes to all this, I will venture to ask: This is better because it is closer/faster/more exact than using the Hall current sensor, or? With my complete lack of understanding, I had the impression, that I could more or less “just” connect the sensor to the “right spots” and directly to the ADC input on the Pico, and my work in the Pico would be similar to this setup?
Don’t get me wrong - I can see this is much more elegant - and won’t be bothered by whatever else might use power on the same rail. But since it might be simpler for me to use a more “out of the box” component like the sensor, instead of my bad soldering of several discrete components… Also however ridiculous it might seem it is much easier for me to source 5 modules - than 5 of each of these components (I would have to buy many of each, and waste most).
So I have to ask. :-)
litchralee@sh.itjust.works 8 months ago
Ah, I entirely missed the sense pin when skimming the datasheet.
That said, using a shunt for an inductive load like a motor may have to contend with the corresponding spikes caused when switching the motor. This just means the thing doing the sensing needs to tolerate the spikes. Or mitigate them, with either a snubber or a flyback diode (is this actually doable with an H bridge?).
As for the op-amp and ADC, if we already accept the additional of the op-amp part, it is also feasible to use a comparator with a reference voltage set for the max safe current. The digital output of the comparator can then be fed directly to the microcontroller, providing fast reaction without the sampling time of an ADC. But this would be so quick that the spikes from earlier could get picked up, unless mitigated.
Still, these solutions are adding to the part count. If that’s a concern, then I’d look for a motor driver with this functionality built in.
boojumliussnark@lemmy.world 8 months ago
OK… I understand very little of this :( I am a software person. But could this comparison not be done with some hysteresis? The part count is not important as long as the parts aren’t terribly expensive, since this is exclusively for my personal use.
litchralee@sh.itjust.works 8 months ago
But could this comparison not be done with some hysteresis?
It can, but analog design is also not my forte.
The part count is not important as long as the parts aren’t terribly expensive, since this is exclusively for my personal use
In that case, the original suggestion of using an ADC and an op-amp would be the most flexible for software. You would, however, need to do some research on wiring an op-amp to amplify the sense voltage to something your microcontroller’s ADC is capable of resolving.
{kind=link}
boojumliussnark@lemmy.world 8 months ago
Ah… Since I am not a smart man, I have already invested too much (for the project) in several of these motor drivers. :-(
litchralee@sh.itjust.works 8 months ago
Out of curiosity, what is this project?
boojumliussnark@lemmy.world 8 months ago
It is a networked window opener/closer for my house, all with parts sourced from China, since the commercially available openers are very overpriced IMHO. Which I guess also speaks a lot to the fact that I am a man with more time than money…
litchralee@sh.itjust.works 8 months ago
I like it!
I once endeavored to do something similar, but it would have been for opening the blinds in the morning and closing them after sunrise.